Overview
This site complements our research on self-contained and automatic robot calibration. For more information, please refer to one of the papers below.
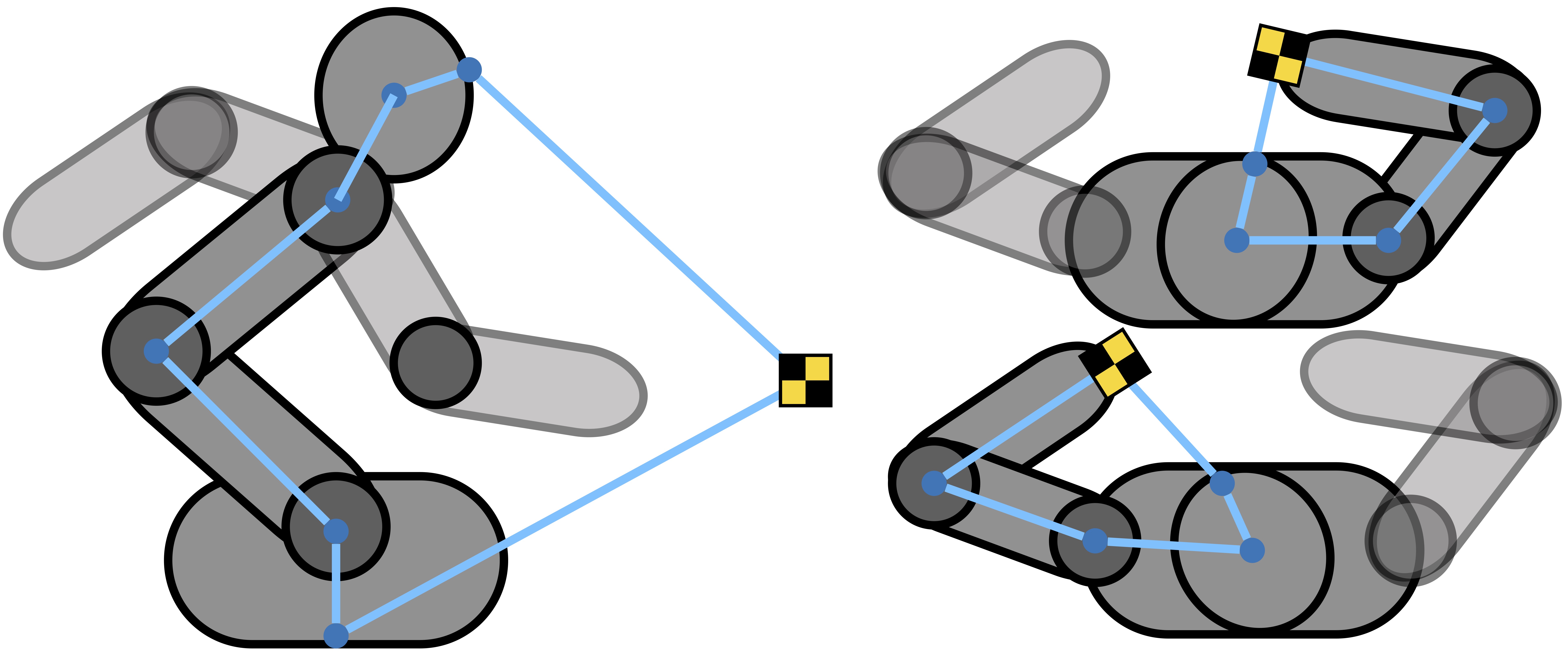
Bayesian View on Task-Oriented Robot Calibration
Submitted to T-RO 2024 by Johannes Tenhumberg, Darius Burschka and Berthold Bäuml.
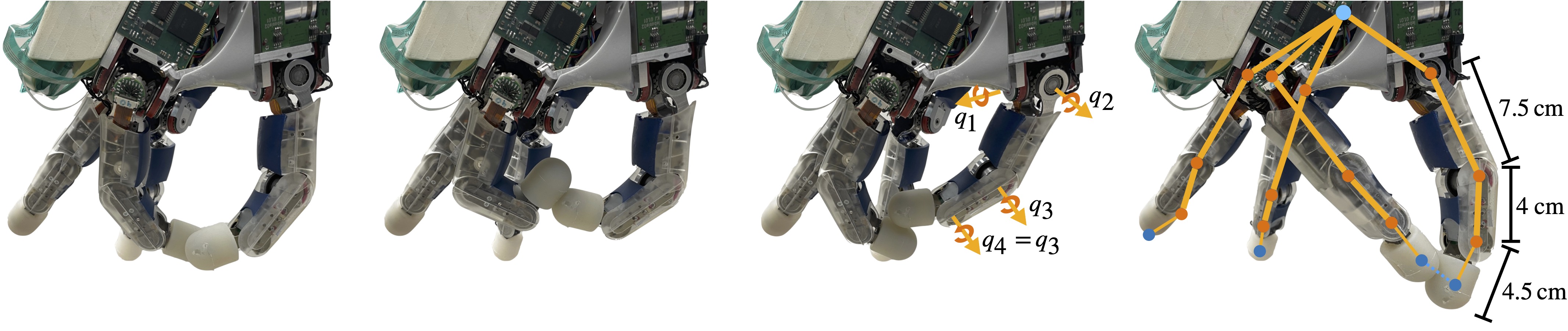
Self-Contained and Automatic Calibration of a Multi-Fingered Hand Using Only Pairwise Contact Measurements
Humanoids 2023 by Johannes Tenhumberg*, Leon Sievers* and Berthold Bäuml.
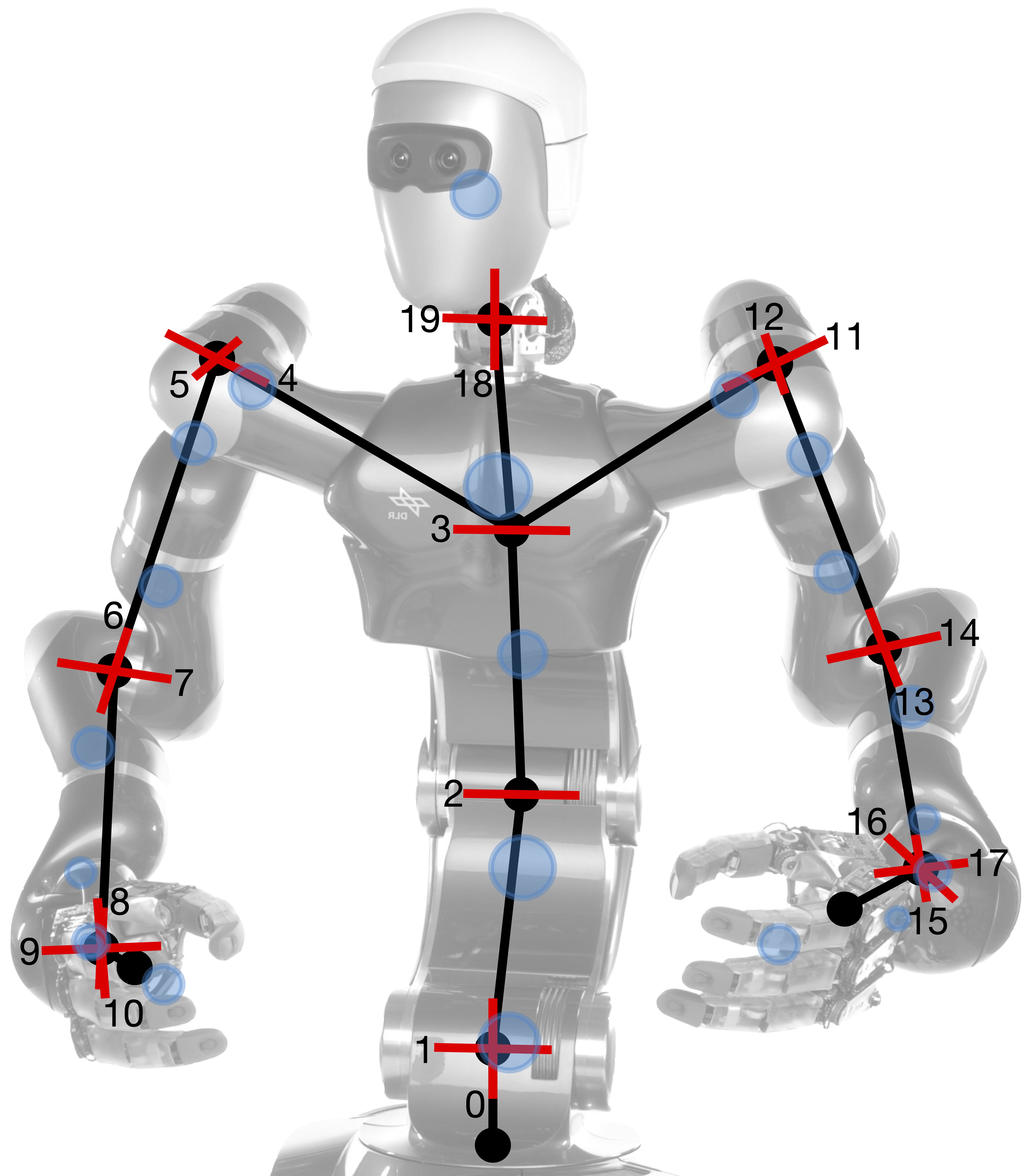
Self-Contained Calibration of an Elastic Humanoid Upper Body Using Only a Head-Mounted RGB Camera
Humanoids 2022 by Johannes Tenhumberg, Dominik Winkelbauer, Darius Burschka and Berthold Bäuml.
Calibration of an Elastic Humanoid Upper Body and Efficient Compensation for Motion Planning
Humanoids 2021 by Johannes Tenhumberg and Berthold Bäuml.