Overview
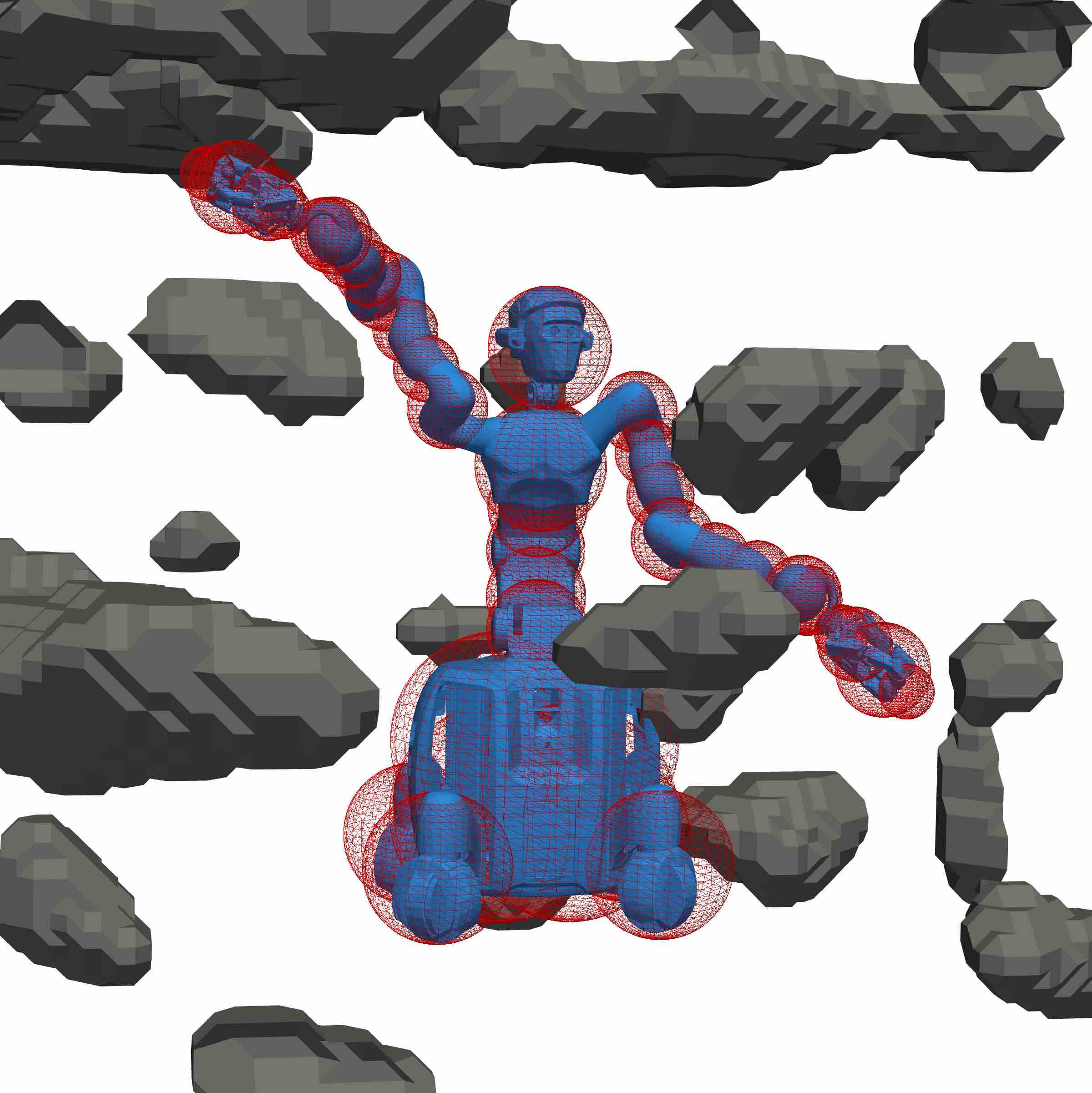
This site complements our research on fast whole-body collision-free motion planning. For more information, please refer to one of the papers below.
Self-Contained Calibration of an Elastic Humanoid Upper Body Using Only a Head-Mounted RGB Camera
Humanoids 2023 by Johannes Tenhumberg Arman Mielke and Berthold Bäuml.
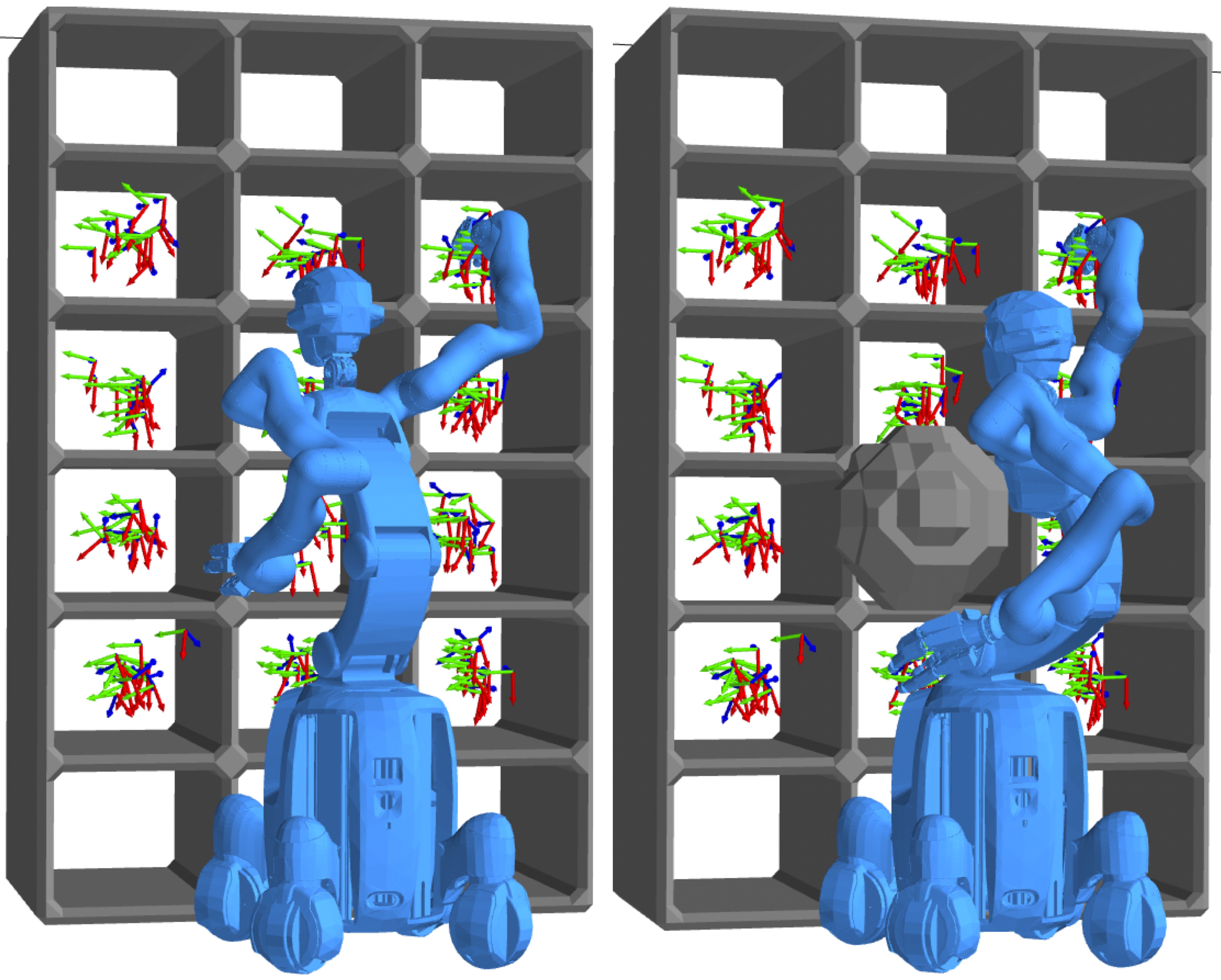
Speeding Up Optimization-based Motion Planning through Deep Learning
IROS 2022 by Johannes Tenhumberg, Darius Burschka and Berthold Bäuml.