This site complements the paper Efficient Learning of Fast Inverse Kinematics with Collision Avoidance by Johannes Tenhumberg, Arman Milke, and Berthold Bäuml presented at the 2023 IEEE-RAS International Conference on Humanoid Robots, in Austin, USA.
Abstract
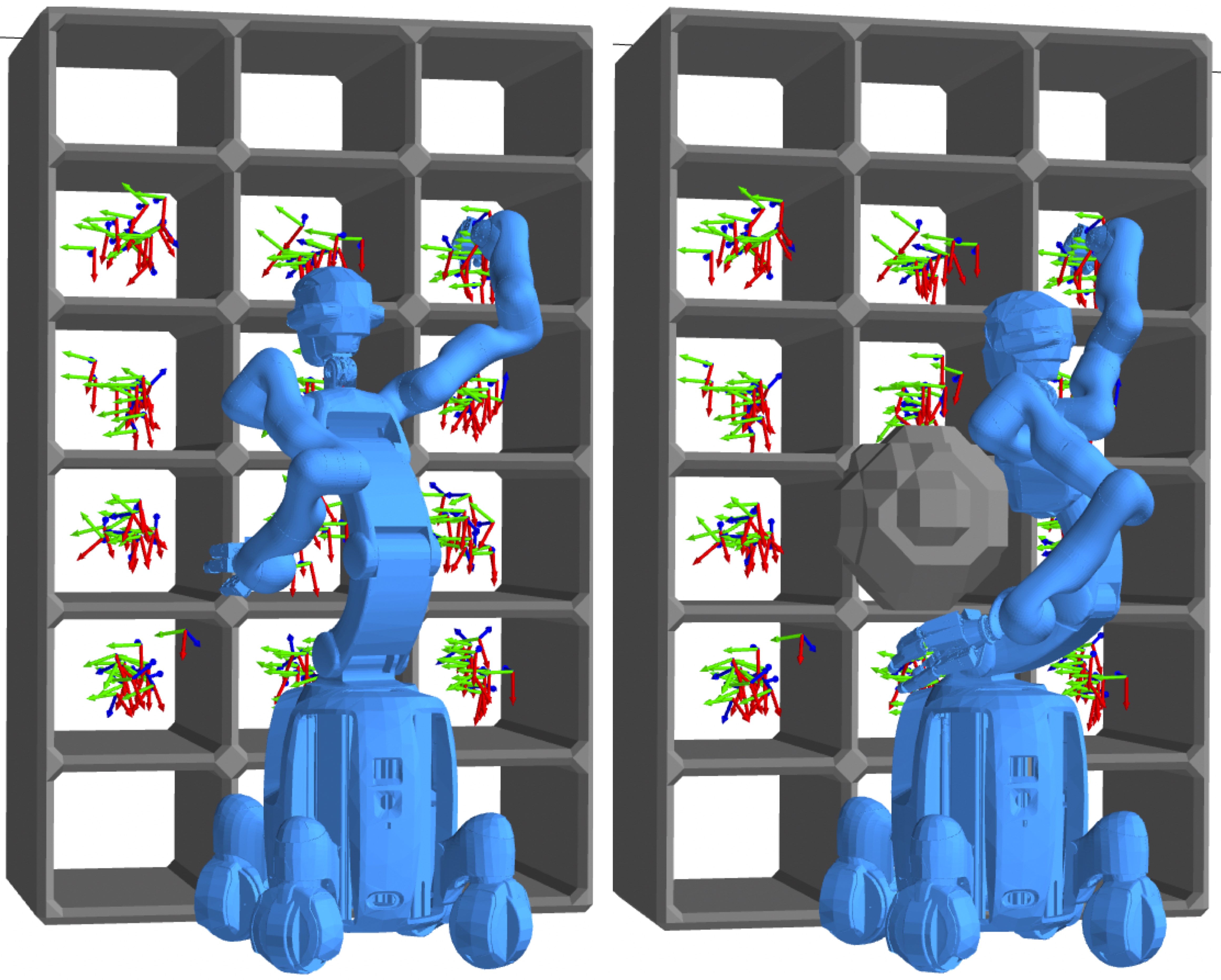
Fast inverse kinematics (IK) is a central component in robotic motion planning. For complex robots, IK methods are often based on root search and nonlinear optimization algorithms. These algorithms can be massively sped up using a neural network to predict a good initial guess, which can then be refined in a few numerical iterations. Besides previous work on learning-based IK, we present a learning approach for the fundamentally more complex problem of IK with collision avoidance. We do this in diverse and previously unseen environments. From a detailed analysis of the IK learning problem, we derive a network and unsupervised learning architecture that removes the need for a sample data generation step. Using the trained network’s prediction as an initial guess for a two-stage Jacobian-based solver allows for fast and accurate computation of the collision-free IK. For the humanoid robot, Agile Justin (19 DoF), the collision-free IK is solved in less than 10 ms (on a single CPU core) and with an accuracy of 10^(−4)m and 10^(−3)rad based on a high-resolution world model generated from the robot’s integrated 3D sensor. Our method massively outperforms a random multi-start baseline in a benchmark with the 19 DoF humanoid and challenging 3D environments. It requires ten times less training time than a supervised training method while achieving comparable results.
Video
Cite this paper as:
@inproceedings{Tenhumberg2023,
author = {Johannes Tenhumberg and Arman Mielke and Berthold B{\"a}uml},
title = {Efficient Learning of Fast Inverse Kinematics with Collision Avoidance},
booktitle = {IEEE-RAS International Conference on Humanoid Robots (Humanoids)},
year = 2023}