Efficient Learning of Fast Inverse Kinematics with Collision Avoidance
Robots
Worlds
BPS
Methods
Results
Gallery
Code
Related Work
AIDX-Lab
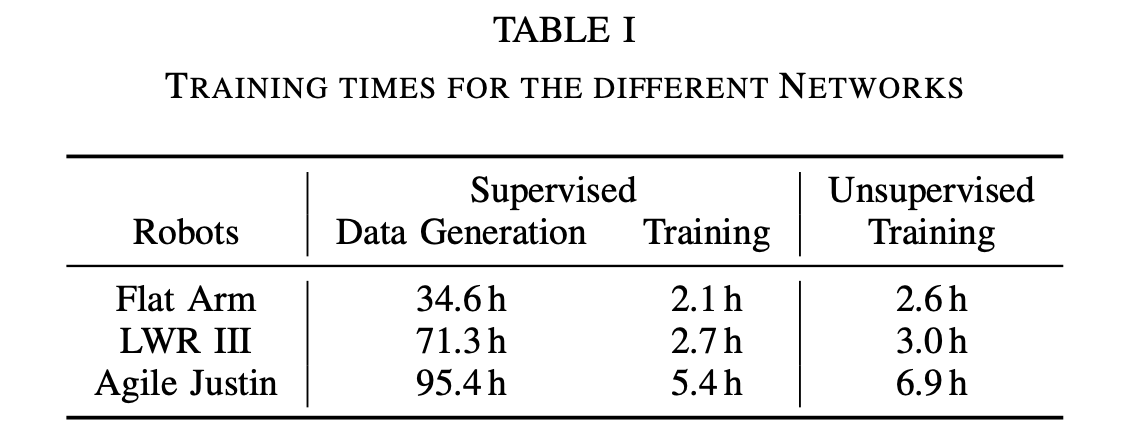
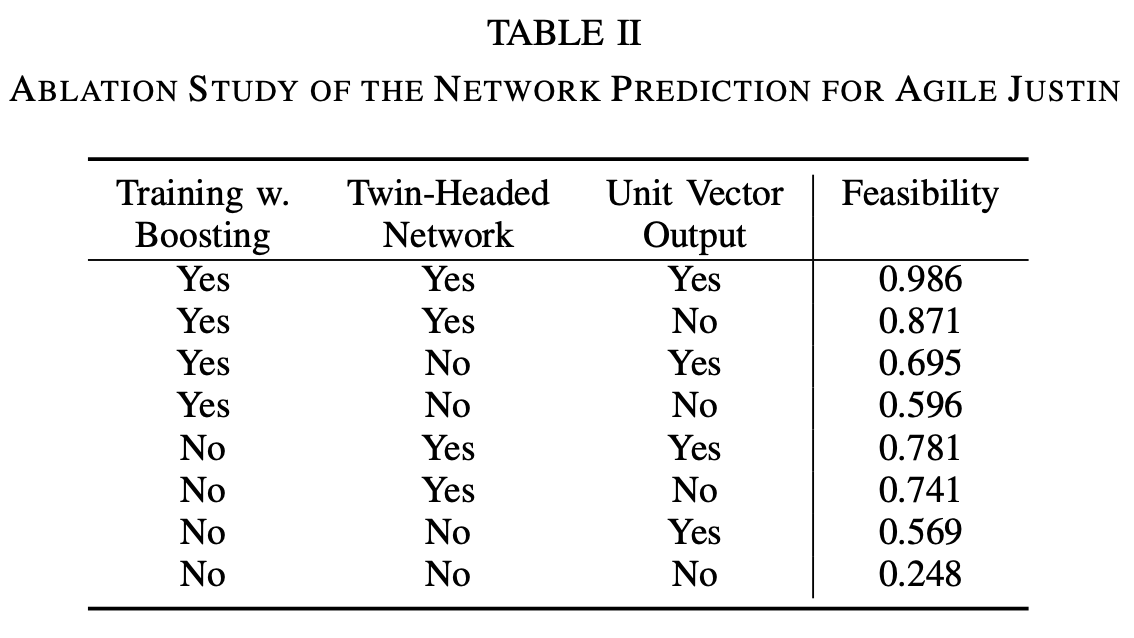
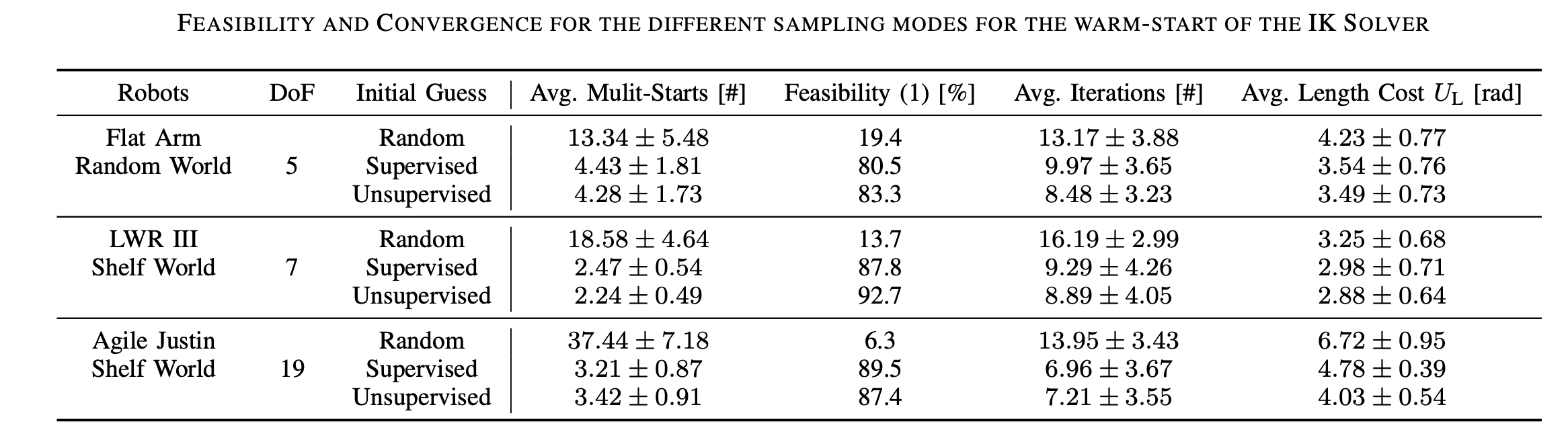
Results
This section gives an overview of our results.