Overview
This site complements our research on purely tactile in-hand manipulation. For more information, please refer to one of the papers below.
Composing Dextrous Grasping and In-hand Manipulation via Scoring with a Reinforcement Learning Critic
ICRA 2025 by Lennart Röstel*, Dominik Winkelbauer*, Johannes Pitz, Leon Sievers, and Berthold Bäuml.

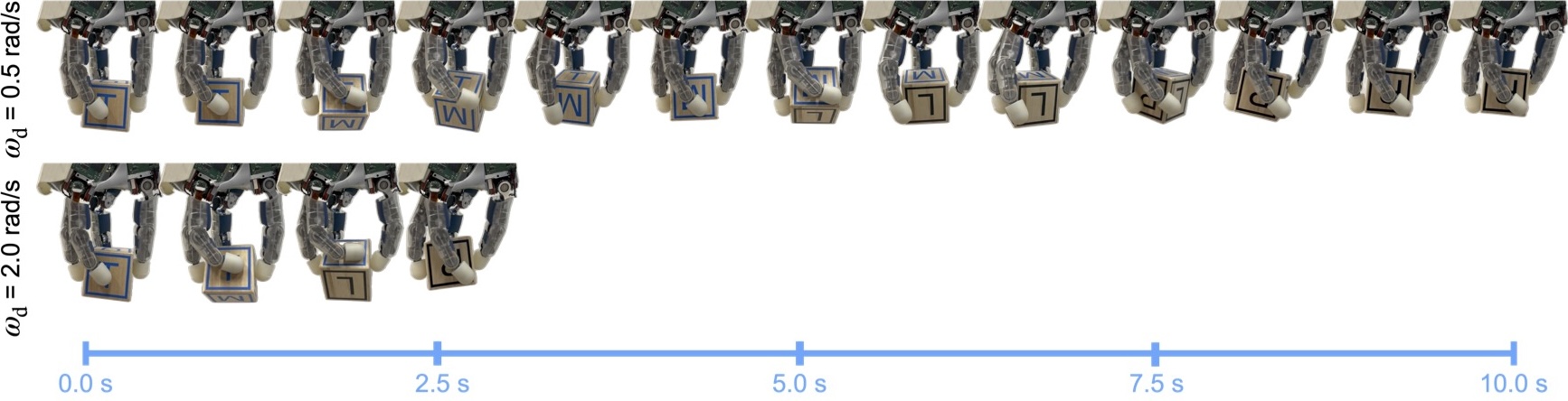
Learning Time-Optimal and Speed-Adjustable Tactile In-Hand Manipulation
Humanoids 2024 by Johannes Pitz, Lennart Röstel, Leon Sievers, and Berthold Bäuml.
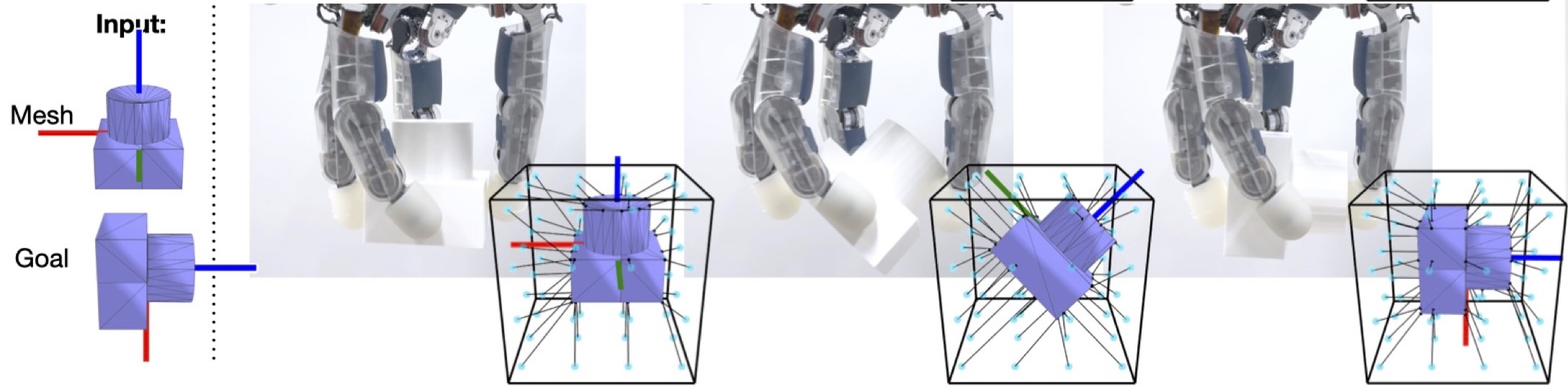
Learning a Shape-Conditioned Agent for Purely Tactile In-Hand Manipulation of Various Objects
IROS 2024 by Johannes Pitz*, Lennart Röstel*, Leon Sievers, Darius Burschka and Berthold Bäuml.
Estimator-Coupled Reinforcement Learning for Robust Purely Tactile In-Hand Manipulation
Humanoids 2023 by Lennart Röstel, Johannes Pitz, Leon Sievers and Berthold Bäuml.
Dextrous Tactile In-Hand Manipulation Using a Modular Reinforcement Learning Architecture
ICRA 2023 by Johannes Pitz, Lennart Röstel, Leon Sievers and Berthold Bäuml.
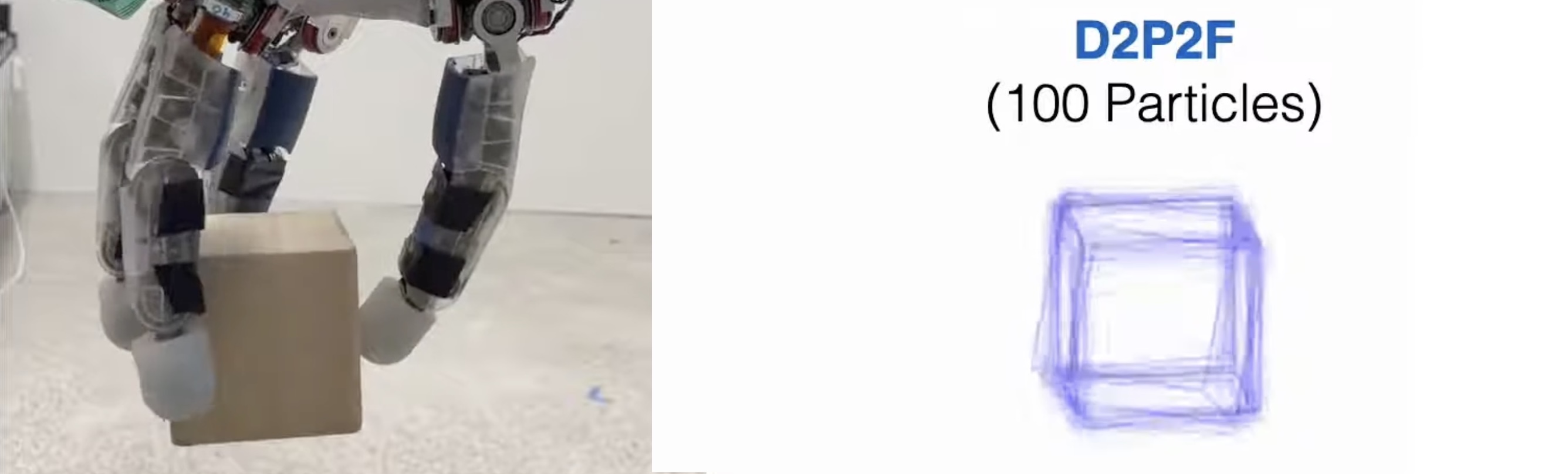
Learning a State Estimator for Tactile In-Hand Manipulation
IROS 2022 by Lennart Röstel, Leon Sievers, Johannes Pitz and Berthold Bäuml.
Learning Purely Tactile In-Hand Manipulation with a Torque-Controlled Hand
ICRA 2022 by Leon Sievers*, Johannes Pitz* and Berthold Bäuml.
