Robot
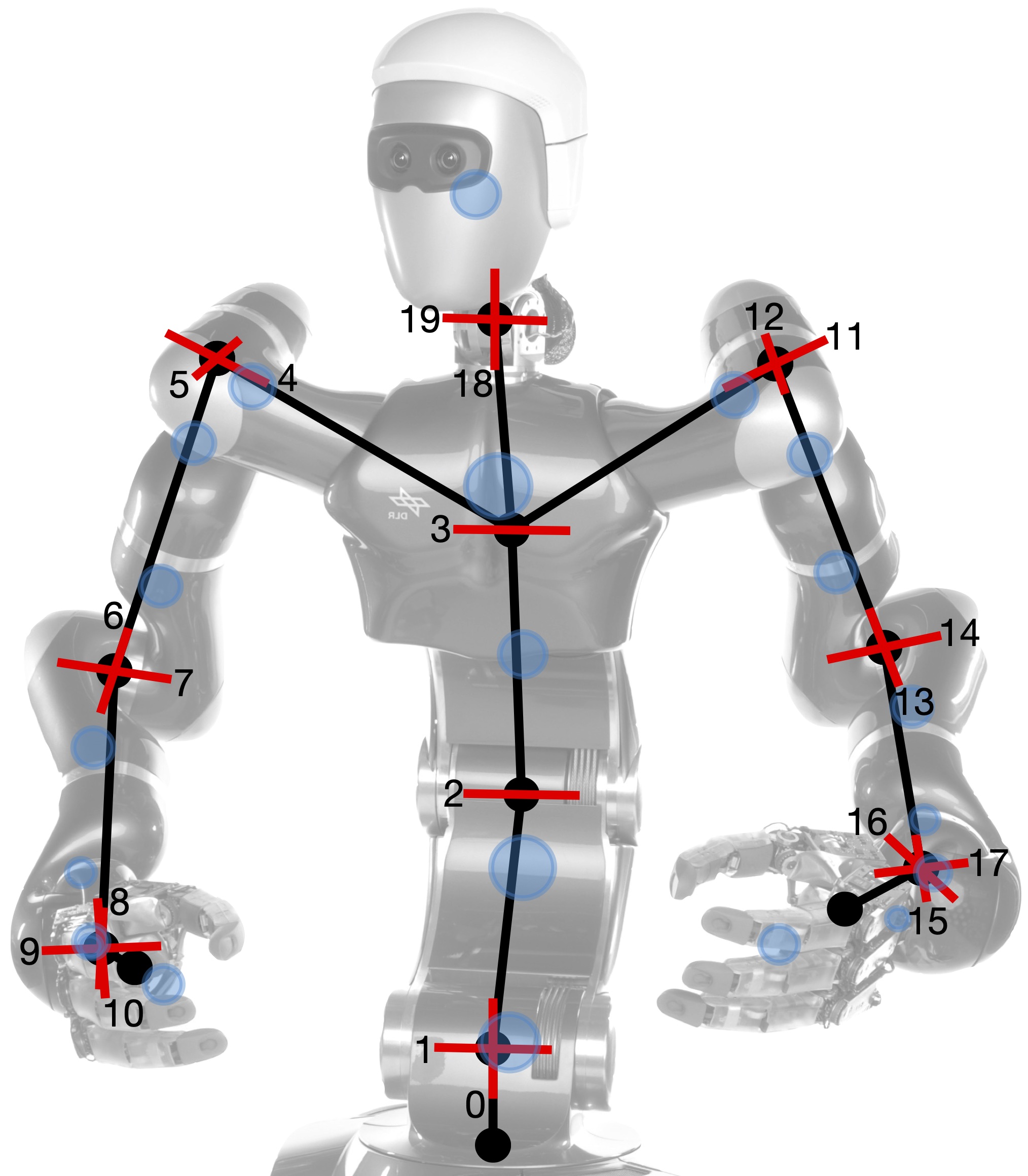 Kinematic tree structure of the humanoid Agile Justin, showing its 20 degrees of freedom (red) and the mass model used for calibration (blue).
Kinematic tree structure of the humanoid Agile Justin, showing its 20 degrees of freedom (red) and the mass model used for calibration (blue).
Here the DLR’s humanoid robot Agile Justin is presented. The robot has 20 joints in the upper body; 4 in the torso, 7 in each arm and 2 for the head. To model the elastic effects we need the masses of each link, we adopted those from CAD files of the robot.
The nominal kinematic of Agile Justin is given by the DH-parameters:
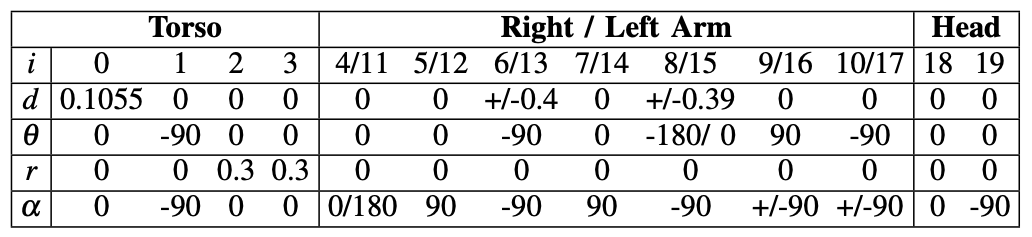 (lengths in meters, angles in degrees)
(lengths in meters, angles in degrees)