Results
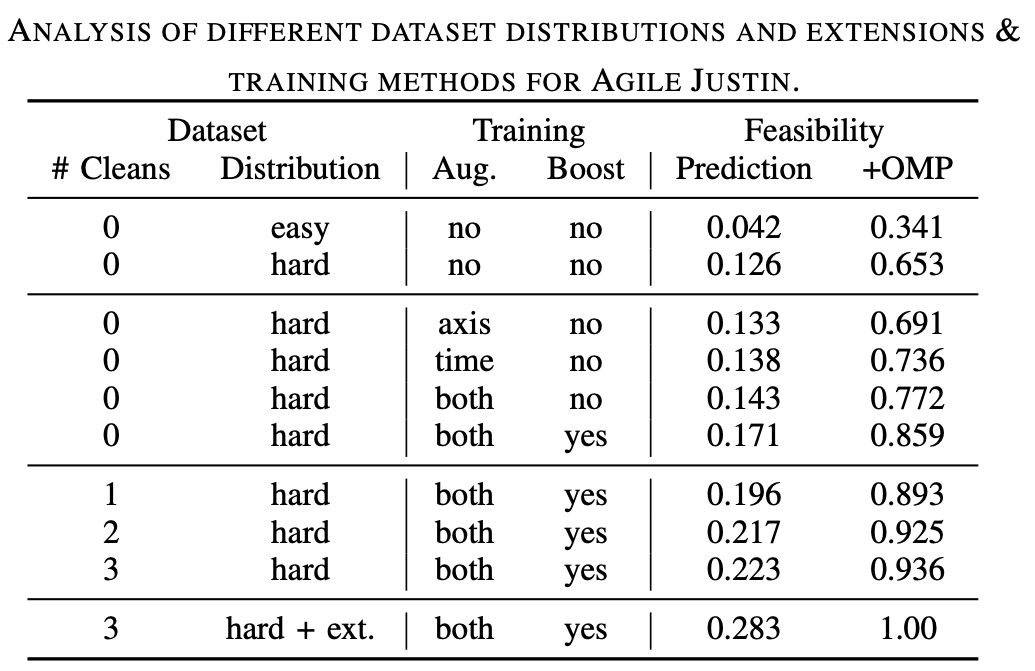 Effect of the different methods for improving the dataset on the feasibility.
Effect of the different methods for improving the dataset on the feasibility.
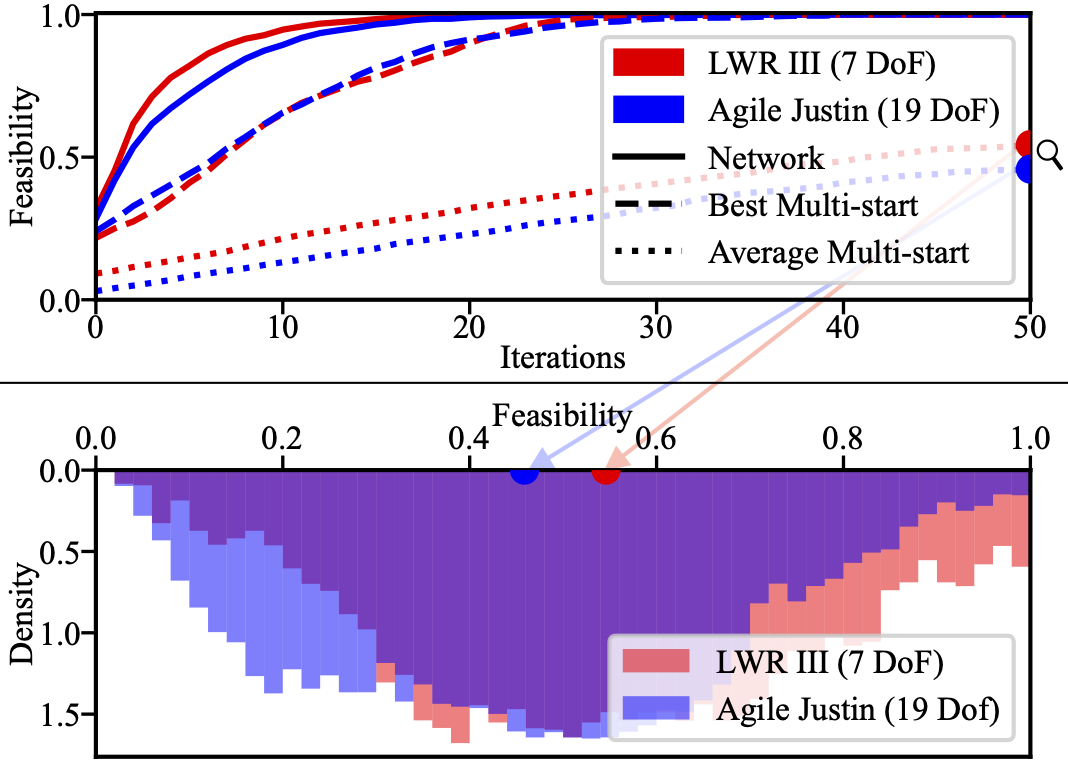 Top: Average convergence to feasibility of OMP for different initial guesses.
The prediction of the network outperforms the average and even the best out of 100 multi-starts significantly.
Bottom: Distribution of the average feasibility of the random multi-starts after 50 OMP iterations.
Top: Average convergence to feasibility of OMP for different initial guesses.
The prediction of the network outperforms the average and even the best out of 100 multi-starts significantly.
Bottom: Distribution of the average feasibility of the random multi-starts after 50 OMP iterations.
First experiments on the real robot
The network was only trained with the random astroid worlds, but was able to generalize to this unseen table scene. The OMP was able to quickly converge to a feasible path for motion problems that required multi-starts otherwise. The direct connection did not result in a feasible solution.*