Overview
This site complements our research on grasping. For more information, please refer to one of the papers below.
A Learning-based Controller for Multi-Contact Grasps on Unknown Objects with a Dexterous Hand
IROS 2024 by Dominik Winkelbauer, Rudolph Triebel and Berthold Bäuml.
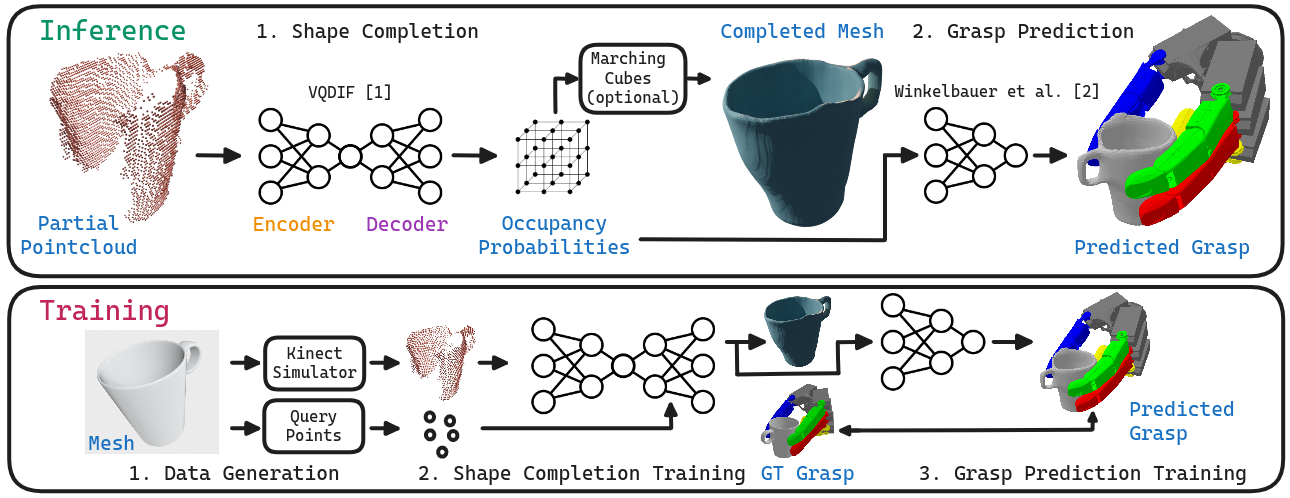
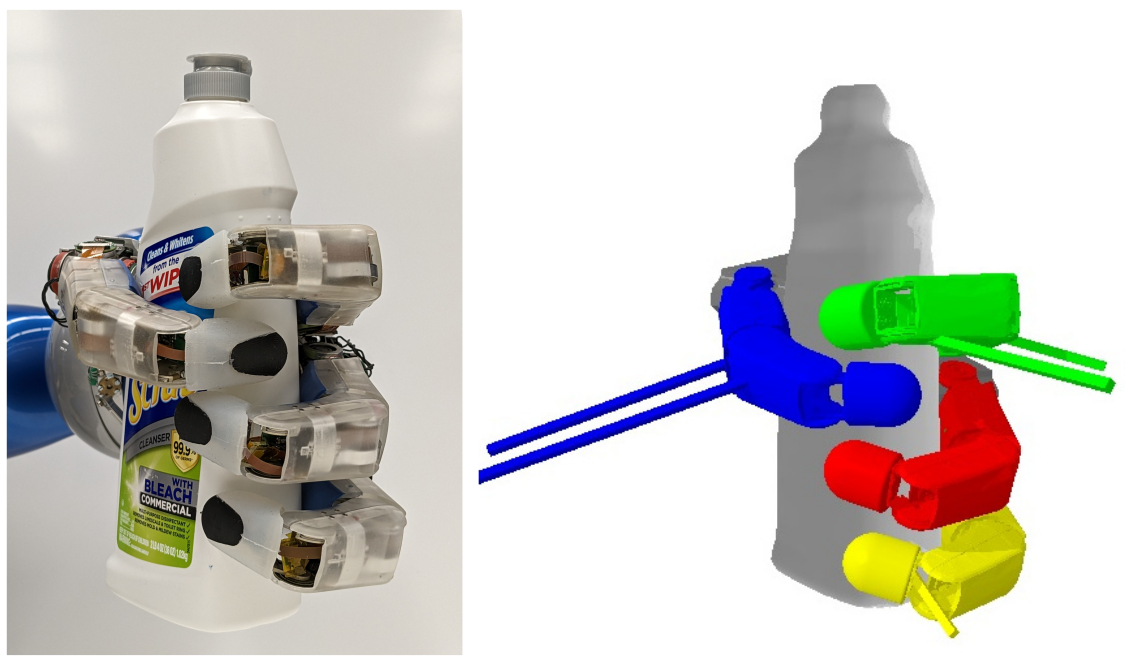
Combining Shape Completion and Grasp Prediction for Fast and Versatile Grasping with a Multi-Fingered Hand
Humanoids 2023 by Matthias Humt, Dominik Winkelbauer, Ulrich Hillenbrand and Berthold Bäuml.
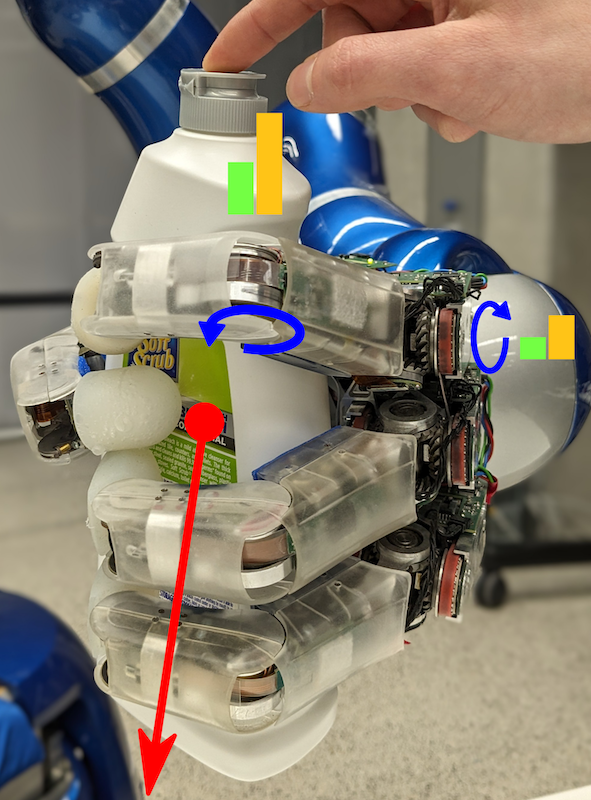
Learning-based Real-time Torque Prediction for Grasping Unknown Objects with a Multi-Fingered Hand
IROS 2023 by Dominik Winkelbauer, Berthold Bäuml and Rudolph Triebel.
A Two-stage Learning Architecture that Generates High-Quality Grasps for a Multi-Fingered Hand
IROS 2022 by Dominik Winkelbauer, Berthold Bäuml, Matthias Humt, Nils Thuerey and Rudolph Triebel.
